
Chasse en palombière
Support au sol pour 4 appelants

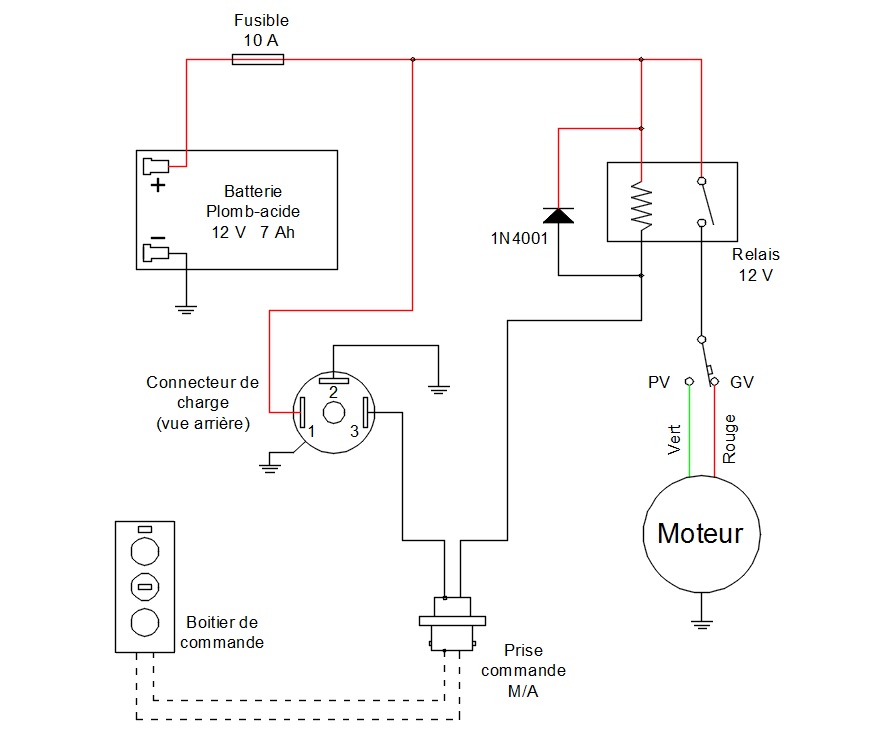
Une came permet d’actionner alternativement chacun des bras de balancier de haut en bas avec une amplitude d’environ 50 cm. Le système est équipé d’un relais de 12V permettant la commande à distance. Le support peut être installé à plusieurs dizaines de mètres de la palombière et être ainsi commandé à distance par un câble à 2 conducteurs de faible section.


La batterie utilisée est une batterie plomb-acide type NP7-12 de 7 Ah. Elle est installée dans un coffret métallique réalisé en tôle de 15/10.
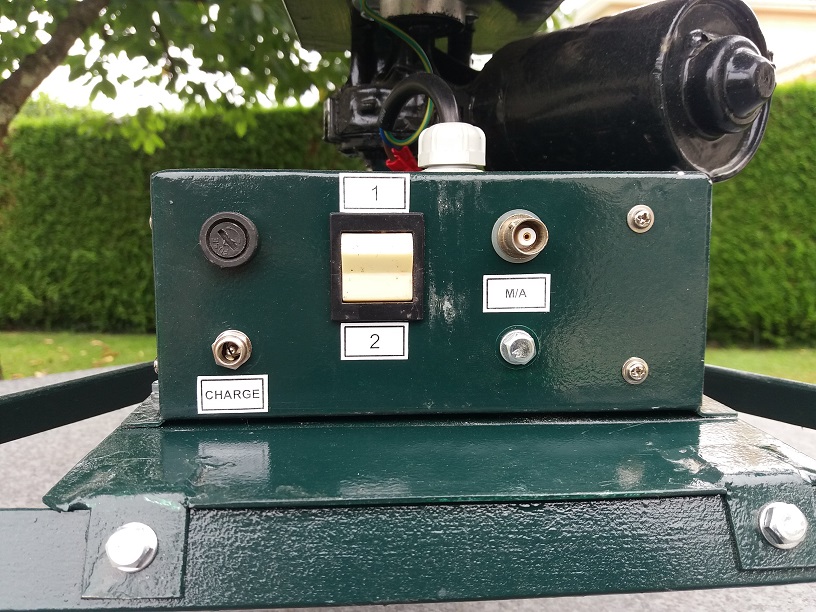
Un panneau de commande et de raccordement en façade du coffret comporte:
Un support pour le fusible général avec fusible 5×20 10A
Un connecteur permettant le branchement d’un chargeur pour la recharge de la batterie
Un commutateur permettant un réglage sur la petite vitesse ou sur la grande vitesse
Une prise permettant le raccordement d’un boîtier de commande.
Le relais 12 V utilisé est fixé à l’arrière du panneau. Une borne de masse a également été installée pour faciliter le câblage de tous les composants. Le connecteur de charge est une prise d’alimentation basse tension (diamètre 5,5 mm – 5A) à 3 pôles. Ceci permet de couper automatiquement l’alimentation du relais (et donc d’empêcher la mise en fonctionnement du système) lorsque l’on charge la batterie. Le support absorbe un courant moyen de 4,5 A; ce qui permet une autonomie d’environ 1h30. La recharge de la batterie se fait à l’aide d’un chargeur spécifique adapté aux batteries Plomb-acide type NP7 délivrant une intensité de 1,3 A. Durée de la charge pour une batterie complètement déchargée: environ 6 h.

A l’origine du projet, le moteur était commandé par un simple interrupteur de mise en marche et d’arrêt. Mais sous le feu de l’action, le chasseur (ou les chasseurs) oubliait fréquemment d’arrêter le moteur lorsqu’une volée de palombes se posait; laissant les malheureux pigeons appelants battre des ailes indéfiniment. Pour cette raison, le système a été équipé d’un boîtier de commande avec temporisation permettant d’arrêter automatiquement le système après un certain temps.
Le fonctionnement du boîtier est le suivant: Un appui sur le bouton poussoir « marche » permet la mise en route du moteur et allume le voyant rouge. Ce voyant reste allumé pendant toute la durée de fonctionnement du moteur. Il s’éteint avec l’arrêt de fonctionnement du moteur. Si aucune autre action n’est effectuée sur le boîtier, le moteur s’arrête de lui-même au bout une durée programmée de 60 secondes (valeur utilisée par défaut). Cette valeur est modifiable à l’aide d’un sélecteur du boîtier de commande et permet de sélectionner au choix, 40s, 50s, 60s, 70s, 80s et 90s. Le boîtier possède un bouton « arrêt » de couleur rouge qui permet d’arrêter le moteur instantanément lorsqu’il est en marche. Le système permet également de relancer la temporisation lorsque le moteur est en fonctionnement en ré-appuyant sur le bouton « marche ». Ainsi, le temps de temporisation est prolongé. Pour permettre de relancer la temporisation avant que le moteur ne s’arrête, un avertissement lumineux et sonore s’active 5 secondes avant l’arrêt programmé du moteur (et ceci pendant une durée de 5 secondes). L’avertissement lumineux est indiqué par le clignotement du voyant rouge. L’avertisseur sonore est un simple buzzer qui retentit pendant 5 secondes à la fin de la temporisation. Dans les 5 dernières secondes de la temporisation, on peut aussi bien relancer la temporisation (bouton »marche ») ou effectuer un arrêt immédiat du moteur (bouton « rouge »).

Le boitier est alimenté par une tension de 4,5 V fournie par 3 piles LR6. Il est équipé d’un interrupteur de mise sous tension. La mise sous tension du boitier est signalée par un voyant de couleur verte. La commande du moteur est établie par l’intermédiaire d’un transistor MOSFET permettant d’appliquer une tension de 12 V sur le relais se trouvant sur le support appelants à proximité du moteur et par l’intermédiaire du câble de liaison situé entre le support appelants et le boîtier de commande.
Le boîtier dispose également d’un commutateur permettant de commander le support manuellement (position « M ») comme auparavant (sans temporisation) ou avec la temporisation (position « T »). Cette possibilité est intéressante lorsque le boitier ne fonctionne plus (fusible grillé, panne de la carte électronique ou piles usées).

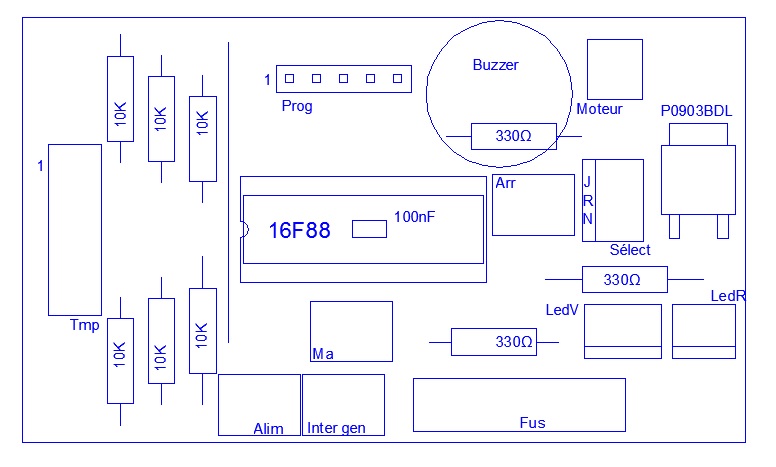

Le circuit électronique de temporisation a été réalisé autour du microcontrôleur PIC 16F88. Les broches RA7, RA0, RA1, RA2, RA3 et RA4 programmées en entrée permettent le paramétrage des 6 valeurs de temporisations: 40s, 50s, 60s, 70s, 80s et 90s. Les broches RB0 et RB4 sont utilisées pour les boutons poussoirs « marche » et « arrêt ». Ces 2 broches paramétrées en entrées (avec résistances de pull-up validées) permettent d’utiliser les « interruptions » du microcontrôleur. RB2, RB3 et RB5 paramétrées en sortie permettent d’actionner respectivement la LED rouge, le MOSFET pour la commande du moteur et le « buzzer ».